
宁德时代锂电池视觉方案(检测)
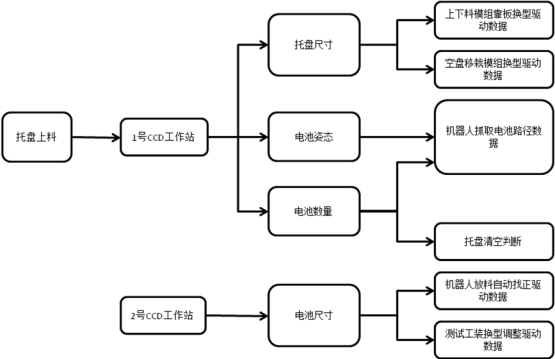
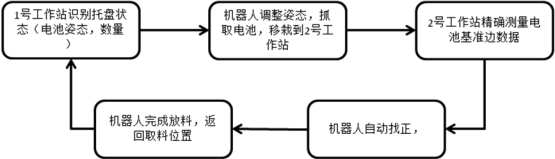
一、视觉系统工作流程:
二、视觉系统功能要求
2.1 1号工作站功能要求
1)准确测量托盘尺寸,为上下料模组提供自动换型数据、为空盘移栽模组提供自动换型数据;
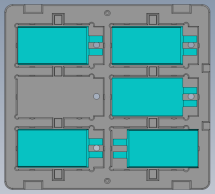
2)准确测量电池姿态、数量,为机器人提供姿态纠偏及抓取路径数据;
3)为空盘移栽模组提供托盘清空判断。
2.2 2号工作站功能要求
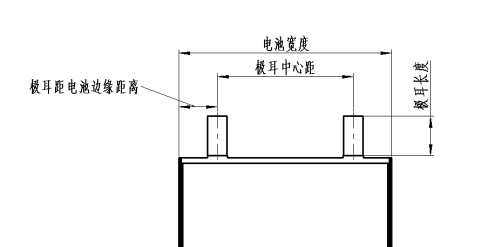
1)精确测量电池尺寸,提供测试工装调整数据以适应新规格产品;
2)精确测量电池基准边位置,为机器人放料自动找正提供精确数据。
三、视觉系统技术要求
3.1 1号工作站技术要求
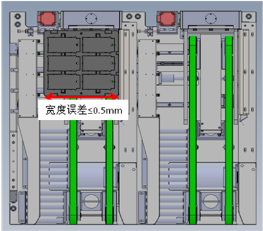
1)1号工作站定位精度要求:托盘宽度测量误差≤0.5mm;
2)1号工作站测量的电池位置数据误差≤±0.5mm;
3)1号工作站对电池摆放不良及空缺电池识别准确率要求:100%;
4)机器人取料路径准确率:100%;
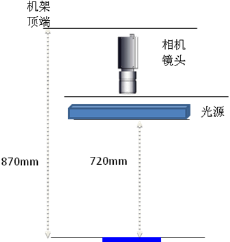
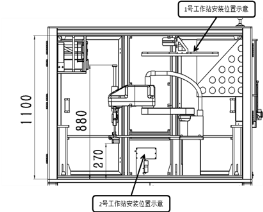
5)1号工作站相机、光源安装高度H1需满足:720mm≤H1≤870mm(相对于电池表面);
3.2 2号工作站技术要求
1)2号工作站测量电池外形尺寸要求误差≤±0.2mm;需要测量的尺寸如下图所示
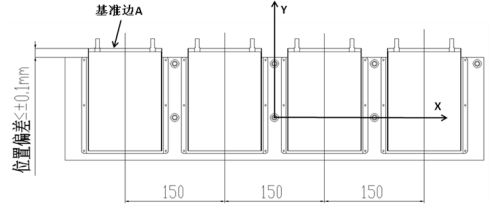
2)2号工作站设定机器人放料路径,要求放料后:4个电池基准边A在Y方向位置偏差≤±0.1mm;电池中心线在X方向位置误差≤±0.3mm;如下图所示:
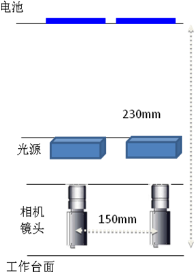
3)2号工作站相机、光源安装高度H2需满足: H2≤230mm(如下图所示);
4)单人操作CCD调整换型总时间≤5min。
3.3 CCD视觉系统总循环时间要求
CCD视觉系统提供数据给机器人,完成下图动作循环总时间≤3s;
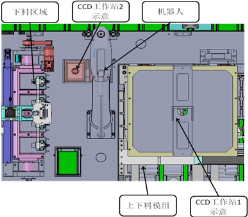
CCD布局示意图
产品实施方案
1.采用高像素工业相机和镜头,相机固定在机械手臂上,基本垂直于目标物体拍摄,先拍照进行抓取,抓取数量满足后,机械手臂移动至放料托盘位置进行放料;
2.采用以太网TCP通讯方式,将数据输出给机器人;
3.与运动机构进行配合,利用视觉控制器相机标定工具将相机坐标系与运动机构坐标系进行统一通过运动轨迹中位置点的分析计算,获取相机坐标相对运动机构原点坐标的转换关系,从而可以将相机中的位置坐标转换为运动机构中的空间坐标;